| Zurück |
| X-UFO Varianten |
| Bernhard Bornschein - Berlin |
|
Die von der Fa. 'Silverlit' hergestellten X-UFO's sind schon länger nicht mehr lieferbar. Beim Online-Handel werden jedoch immer wieder welche angeboten – meist gebraucht und mehr oder weniger beschädigt. Verkaufstexte wie : Nur ein paar mal geflogen – Absturzfrei ! - aus Zeitgründen - sind unglaubwürdig - wie ich jetzt weiß. Von einem erfahrenen Modell-Helicopter Piloten – vielleicht. Jedem Anfänger sowieso, oder wer bisher ausschliesslich Flugzeuge geflogen hat, dem stürzt das X-UFO unweigerlich ab – sofort oder später. Hauptproblem ist auch das mechanische Kreisel-System, dessen Grenzen schnell erreicht sind. Bei etwa nur 20° Schräglage kann die rotierende Kreiselscheibe schon am Gehäuse anstoßen und es kommt unweigerlich zu einem sogenannten 'FOD' – Flip of Death. Das X-UFO macht einen Salto und wird unkontrolliert Abstürzen. In diesen gefährlichen Bereich gelangt man schnell. Eine leichte Windböe genügt, oder eine stärkere Korrektur der Fluglage – das war's ... |
||
|
|
|
|
|
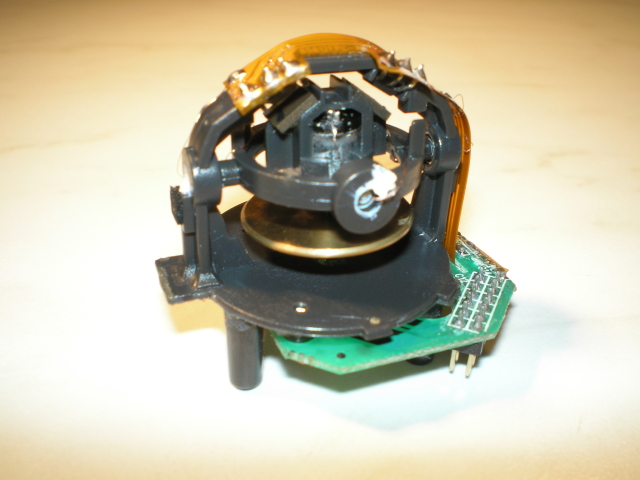
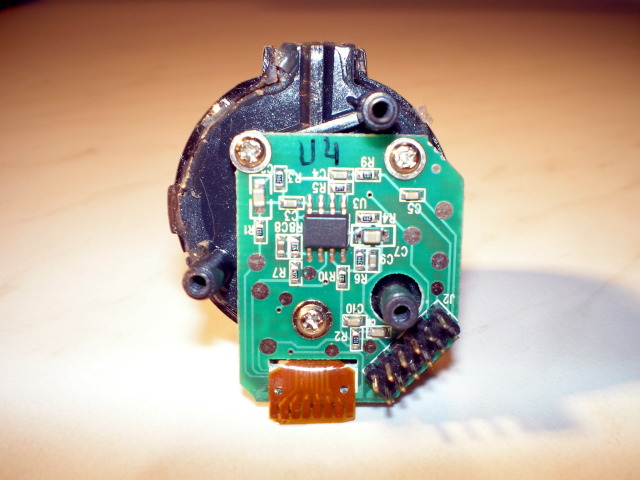
Ein originales Kreisel-System vom X-UFO |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ein kleiner Motor treibt eine Messingscheibe an. Über Kreuz gelagert aufgehängt ist dieses rotierende System somit frei beweglich. Durch die Rotation bleibt die Messing Scheibe immer Waagerecht. Am beweglichen Teil oben sind zwei Magnete angebracht. Ihnen gegenüber am Rahmen sind Hall-Sensoren angeordnet, die einen dem Magnetfeld entsprechenden Spannungspegel an den Mikrocontroller liefern. Dadurch soll der Controller die aktuelle Fluglage erkennen und das UFO bei neutraler Stellung der Steuerknüppel für die Nick- und Rollachse wieder in den Schwebezustand bringen. Diese Null-Position wird beim Einschalten des X-UFO's durch die Kreisel-Reset-Routine ermittelt. Steht das UFO beim Einschalten schräg, fliegt es auch schräg. |
|
|
||
|
Der mitgelieferte 10 Zellige NiMH Akku mit 350 mAh ermöglicht Flüge von nur 10 min Dauer und ist damit ein echter Spaß Verderber – auch wenn man mehrere hat. Ein LiPo 3/850 von X-Cell passt nach leichter Änderung des originalen Akku-Halters in diesen hinein und man kann doppelt so lange fliegen. Größere Akku's werden von einem Klettband, welches zwischen Mainboard und Rahmen eingesetzt wird, gut gehalten. Vorher sollte man die Einrastungen des originalen Akkuhalters abschleifen, weil sie scharfe Kanten haben und den LiPo beschädigen könnten – was unbedingt zu verhindern ist - Feuergefahr. |
||
|
Der Umbau auf Piezo-Gyro-Sensoren ist ein muss, wenn man sein X-UFO nicht kaputt fliegen will. Im X-UFO Forum findet man auch einige Lösungen. Manche benutzen die originale Kreisel-Platine zum Aufbau, andere entwickelten eine eigenes Layout und Elektronik. Damit lassen sich X-UFO's schon wesentlich besser fliegen – wie man lesen kann. Ich zog es jedoch vor ein erprobtes Kreisel-System anzuschaffen. |
||
|
|
|
|
|
|
|
X-3D Piezo-Kreiselsystem Das Montieren des 'X-3D Piezo-Kreisel' auf dem originalen 'China-Board' ist schnell erledigt. Zum Laden der X-3D-Software wird ein USB-Adapter vom gleichen Hersteller benötigt. Mit einem 'Jumper' kann zwischen drei Flug-Modis: Anfänger, Fortgeschritten und Profi gewählt werden. |
|
|
|
|
|
Das X-UFO fliegt jetzt im 'Heading-Hold-Modus', das heisst, der letzte Steuerbefehl bleibt aktuell. Das UFO geht nach loslassen der Steuerknüppel (Nick, Roll, Gier) nicht in den Schwebezustand, sondern behält die letzte Fluglage bei – und wird abstürzen, wenn man nicht gegensteuert. Wie ein 'normaler' Helicopter. Die Produktion der 'X-3D' Baugruppe ist mittlerweile eingestellt. Eine neue, im Funktionsumfang erweiterte Baugruppe ist erschienen und heist 'Funpilot'. Gebrauchte 'X-3D' sind oft günstig von Umsteigern erhältlich. |
||
|
|
|
|
|
Um nun vom 27 MHz Bereich auf eine 35 MHz Modell-Flugfrequenz umzusteigen sollte man das 'Mainboard' des X-UFO's austauschen, anstatt an dem 'On Board-Empfänger' herum zu basteln. Das funktioniert zwar auch (manchmal schon durch einsetzen eines 35 Mhz Quarzes), weil der Empfänger 'breit' genug ist. Das ist aber zu unsicher. Manche haben den X-UFO-Empfänger durch Auftrennen von Leiterbahnen isoliert und einen externen Empfänger angeschaltet. Man benötigt das PPM-Summensignal eines Empfängers zur Ansteuerung des Mainboards. Bei vielen Typen lässt sich dieses Signal problemlos abgreifen und herausführen. |
||
|
Die Entscheidung viel auf die von Astec entwickelte Basisplatine 'X-Base'. |
||
|
|
|
|
|
|
|
X-UFO Nr.1 ist komplett mit der Elektronik der Ascending Technologies GmbH (www.asctec.de) ausgerüstet. Vertrieben werden diese Baugruppen über den X-UFO-Shop (www.xufo-shop.de) in Nürnberg.
|
|
|
|
|
|
Mit dieser Elektronik ausgestattet, lässt sich ein X-UFO sehr kontrolliert auch auf engstem Raum fliegen. Mit zugeschalteter X-ACC – sicheres Schweben und Fliegen – bis der Akku leer ist .. Den Beschleunigungs-Sensor 'X-ACC' braucht man nicht unbedingt – er erhöht jedoch den Schwebe-Komfort erheblich. Man kann diese Funktion auch während des Fluges Ein- oder Ausschalten. |
||
|
|
|
|
|
|
|
X-UFO 1 ist noch mit den serienmäßigen Bürsten-Motoren ausgerüstet. Die LED's an den vier Motor-Platinen signalisieren Flugbereitschaft, Akku-Zustand oder System-Störungen. Die originalen SMD-LED's wurden durch hellere 5 mm LED's ersetzt, um auch in 1 m Flughöhe die Lichtsignale noch am Boden sehen zu können. Drei blaue LED: 3,4 cd ; 15° und vorn eine rote LED: 10cd ; 30°. Die rote 3mm Front-LED wurde durch eine weiße 5 mm LED: 16cd ; 20° - leicht nach unten geneigt - ersetzt. Die Gleitlager der Propeller-Wellen wurden durch Kugellager ersetzt. (als Tuning-Set erhältlich) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Mit Flex-LED-Streifen (120° Öffnungswinkel) für noch mehr Licht ist der Quadro als Nachtflug-UFO ausgerüstet. Durch die gesamte Rundum-Beleuchtung fließen 180 mA bei 12 V. Der zusätzliche Stromverbrauch verkürzt zwar die Flugzeit – sieht aber sehr Schick aus. Mit einem 3/1500 LiPo beträgt die Flugzeit immerhin 20 min (bei gemütlicher Flugweise). Dann muss man eh' Pause machen, weil die Motoren schon zu warm – also heiß – sind und Schaden nehmen würden.. Bei Bürsten-Motoren wird der Strom über Kohle-Bürsten und rotierendem Kollektor den Wicklungen zugeführt. Das bedeutet Verschleiß durch Abrieb und Funkenbildung. Die sogenannten 'Abreissfunken' entstehen durch die Gegeninduktion der Wicklungen wenn der Stromfluss unterbrochen wird. Auf einem rotierenden Kollektor kann man einen (möglichst geringen) Funken-Ring sehen. Diese Funken verbrennen nicht nur die Kohle-Bürsten sondern erzeugen auch ein breites Störspektrum, welches natürlich auch von der eigenen Antenne aufgenommen wird und den Signal-Rauschabstand des Empfängers verschlechtert. Zudem sitzt der Empfänger auch noch Mittendrin. Es verringert sich somit die Reichweite der RC-Anlage. Auf dem Foto oben sieht man links und rechts neben der Motor-LED je eine Drossel-Spule, die zusammen mit SMD-Kondensatoren auf der Motor-Platine Filter bilden, die diese Erscheinung minimieren. Besonders wichtig ist auch die Diode, welche in Sperrrichtung zur Motor-Stromversorgung geschaltet, direkt am Motor montiert ist. Diese Rückstrom-Schutzdioden begrenzen die durch Gegeninduktion entstehenden Impulsspitzen auf einen für die Steuerelektronik ungefährlichen Wert. Ansonsten würden die Transistoren oder MOS-FET's der Motor-Endstufen Schaden nehmen. Zeitgemäß ist ein Antrieb mit 'Bürstenlosen Motoren'. Bei diesen Motoren ist die Wicklung fest montiert und der Rotorkern direkt mit der Propeller Achse verbunden. Die Ansteuerung dieser Drehstrom-Motoren erfolgt über spezielle Brushless-Regler. Jeder Motor hat einen eigenen Regler der meist über ein I²C-Bussystem von der Basisplatine angesteuert wird. Das mehr an Antriebsleistung durch weniger Reibungsverluste (Bürsten/Kollektor und Getriebe) und effektiverer Energiezuführung bedeutet mehr Flugspaß durch größere Agilität bzw. mehr Kraft um einen mit Video-Technik ausgerüsteten Quadrocopter überhaupt in die Luft zu bekommen - aber auch deutlich höhere Kosten. Neben den Motoren müssen vier weitere Baugruppen montiert werden. Die Anzahl der Mikrocontroller und Software-Prozesse erhöht sich um vier. Das bringt wieder andere Probleme mit sich. Mittlerweile kann man jedoch auf viele erprobte Motor / Propeller / Regler - Kombinationen zurückgreifen. |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
X-UFO Nr.2 hat noch die originale Basis-Platine 'China Board'. Es ist ebenfalls mit einem 'X-3D Kreisel-System' ausgerüstet und ist damit bereits gut zu fliegen.
Die Lager der Propeller-Achsen wurden auch bei diesem Modell durch Kugellager ersetzt.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Die Motor-Leuchtdioden wurden auch bei diesem X-UFO ausgetauscht. Die blauen LED's haben 12 cd bei 18° Öffnungswinkel, die vordere, diesmal grüne LED: 13 cd ; 20° und als 'Flugscheinwerfer' eine weiße LED: 16 cd bei 20°. Mittlerweile gibt es bestimmt wieder hellere LED's bei gleichem Strom und Preis. Als Front-Beleuchtung wurde ein 3er Flex-LED-Streifen (je 120° ) angebracht. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
10.11.14 Bernhard Bornschein |
||
|
|
|
|