|
Zum Aufbau der QuadroControl II XS von sind SMD-Bauteile erforderlich. Ohne diese wäre der Aufbau auf einer 70x70 mm Platine nicht realisierbar. Der Lohn der SMD-Lötarbeit ist eine gute, universelle Steuerung für Quadro Copter. In diesem Beispiel erfolgt der Aufbau mit 'X-UFO' (Silverlit) - Teilen, die immer wieder im Online-Handel angeboten werden - denn die Quadro Control II XS passt dort genau hinein. |
|
|
|
Zum Bestücken der SMD-Bauteile wird die Platine mit Pinwand-Nägeln auf einer kleinen Pappschachtel fixiert. So kann man schnell die Lage der Platine durch drehen der Schachtel ändern - und sie ist den Augen etwas näher. Zum Halten der positionierten SMD-Bauteile dient dieses dreibeinige Hilfsmittel - eine Metallkugel mit Stahlnadeln. Diese Löthilfe ist die Idee eines findigen Bastlers. Man braucht eine SMD geeignete Lötstation mit 0,4 mm Lötspitze , SMD-Lötzinn 0,5 mm, eine Kopflupe, Geduld und eine ruhige Hand. |

|
|
|
|
|
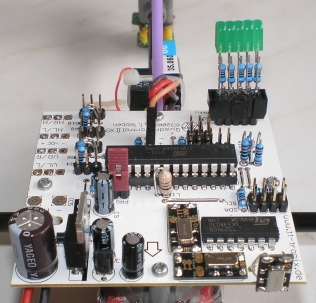
Auf der oberen Seite der Platine sind alle 'bedrahteten' Bauteile untergebracht. Vorn rechts sind die auf Adapter-Platinen montierten SMD-Gyro-Sensoren zu sehen. Die Platine ist ursprünglich für die bedrahtete Variante der Sensoren entwickelt, die gerade nicht erhältlich waren. Die Bauteile, die zum Betrieb der Brushless-Controller erforderlich sind, wurden schon bestückt, da sie etwas später benötigt werden könnten. Zunächst jedoch soll der Quadrocopter mit den serienmäßigen Bürstenmotoren betrieben werden. |
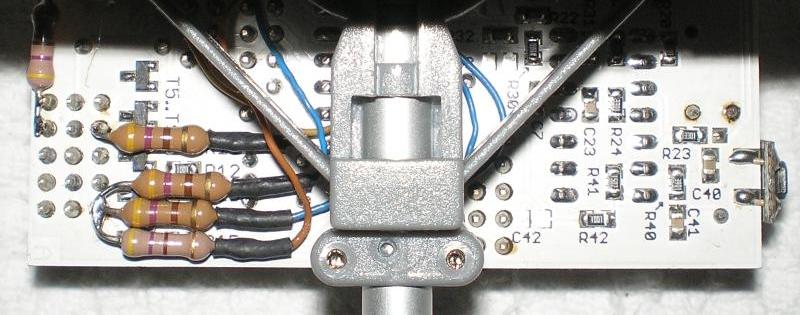
Sämtliche SMD-Bauteile sind auf der unteren Seite aufgelötet. Als Akku wird zunächst ein 3/850 mAh LiPo benutzt. Der originale X-UFO Akku-Rahmen ist etwas geändert, damit diese X-Cell-Type gut hinein passt. |